Smart Warehouse CAD-to-SimReady Digital Twin
一個 industrial OpenUSD / Omniverse warehouse scene,串接 CAD-derived assets、SimReady warehouse components、營運事件 overlays、camera intent 與 validation artifacts。
從 CAD 檔案到可檢查的 warehouse twin
Industrial digital twin 常常從許多碎片開始:CAD files、equipment models、warehouse layout、camera locations、safety zones、operational events。這個 project 關注的是這些碎片如何變成可以被檢查的 scene structure。
這個專案建立一個 smart warehouse / inspection-cell digital twin。OpenUSD stage 將 CAD-derived assets、NVIDIA warehouse / factory assets、camera intent、operational event overlays 與 validation reports 組成一個可在 Omniverse 中檢查的場景。

Warehouse overview. 一個 composed OpenUSD stage,包含 storage racks、receiving congestion、pallet-truck context、event beacons 與 camera coverage markers。
整合問題
CAD files、warehouse asset packs、inspection targets、camera plans 和 operations events 分散在不同工具裡。完成後的 render 會把這些 inputs 來自哪裡藏起來。
Converted CAD、referenced warehouse assets、event JSON、camera coverage、safety zones 與 validation checks 被整理成一個可以視覺與程式檢查的 OpenUSD stage。
Pipeline

可重複的 pipeline. CAD、warehouse assets、operational events 與 validation reports 被組成 SimReady-oriented OpenUSD scene。
NIST STEP parts、Kuka STEP source、warehouse asset packs 與 SimReady components。
Structured /SmartWarehouse stage,包含 environment、storage、receiving、operations、inspection cell、sensors 與 event overlays。
Blocked aisle、near-miss、defect-detected events 被映射到 3D positions 並保留 source IDs。
檢查 required prims、authored references、up axis、scale、bounds 與 event coverage。
Scene material

Receiving event. Pallet congestion 被映射成 blocked-lane event,同時 pallet-truck path 與 safety zone 發生交會。
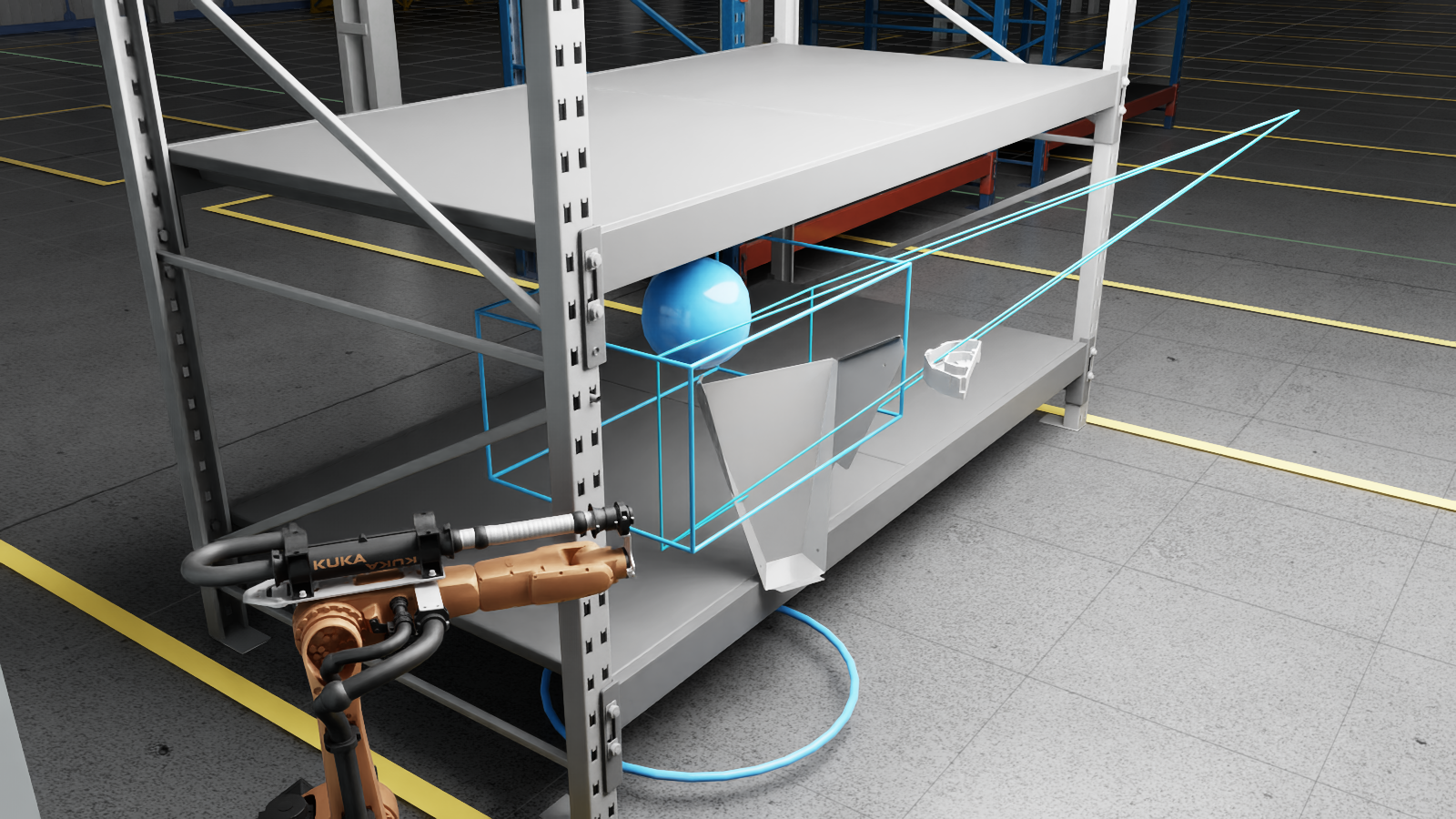
Inspection cell. CAD-derived Kuka workcell、defect-detection target、converted part 與 inspection overlay。
CAD / USD check. Inspection cell 把 converted 或 referenced engineering assets 放進 scene record。
Scene structure check
stage validation
current report 中的 validated prims
authored asset references
normalized scene bounds
Validation script 檢查 default prim、units、up axis、required warehouse structure、authored references、nontrivial scene bounds 與 event coverage;也確認三種 operational event types:blocked receiving lane、pallet-truck near miss、surface defect detected。
BIM/VDC coordination layer
Warehouse scene 已經展示 CAD-derived assets、operational events 和 validation checks 如何進入一個 OpenUSD stage。我補上的 BIM/VDC source path 是同一個方向:facility review 不能只有 composed 3D view,也需要 source element identity。
這個 extension 使用 public buildingSMART IFC fixture 作為 BIM input,抽出 entity / category metadata,建立 deterministic proxy bounds,檢查 representative fab-style equipment keepout envelopes,最後輸出 JSON、Markdown issue report,以及 OpenUSD-style USDA coordination layer。

IFC to coordination layer. BIM layer 保留 source identity、clearance checks、issue markers,以及可和 warehouse scene 並置的 USDA overlay。
public IFC fixture, CC BY 4.0
IFC entity types counted
product-like elements across 4 IFC categories
3 個 equipment mockups 產生的 clash / clearance records
| 輸出產物 | 保留的內容 |
|---|---|
| element summary JSON | source URL、license、parser mode、IFC entity counts、GlobalId/name fields、proxy bounds |
| clash / clearance JSON | equipment envelopes、issue IDs、severity、affected BIM element、distance、validation basis |
| USDA coordination layer | BIM proxy elements、fab-style keepout boxes,以及 OpenUSD-style composition 可讀的 per-issue markers |
資料說明。 IFC fixture 是 generic public architecture,不是 semiconductor fab。EUV scanner、wet bench、AMHS stocker 是 representative keepout mockups。這裡的 boxes 是 deterministic proxy validation,讓 workflow 可重複;native IFC geometry 和 BCF-style issue export 會是下一階段升級。
Scope
- OpenUSD stage composition script
- CAD / STEP conversion checks for factory components
- referenced warehouse and factory asset structure
- event JSON mapped into scene coordinates
- validation report and screenshot manifest
- public asset packs 代表 customer facility data category
- operational events 是 authored JSON
- physics 與 collision proxies 是下一階段延伸
- deployment integration 與 live warehouse control 屬於下一階段
這個 workflow 適用的方向
這是 smart-city traffic case 的 industrial companion。它最直接關聯到 Omniverse、OpenUSD、CAD/BIM/Revit import、SimReady assets、factory / warehouse simulation、synthetic data、robotics testing 或 Physical AI workflows 等工作流程。
實際價值很直接:分散的 engineering / operations inputs 變成 structured 3D scene,讓技術 reviewer 可以把它當成 data 檢查,也能用視覺方式 review。